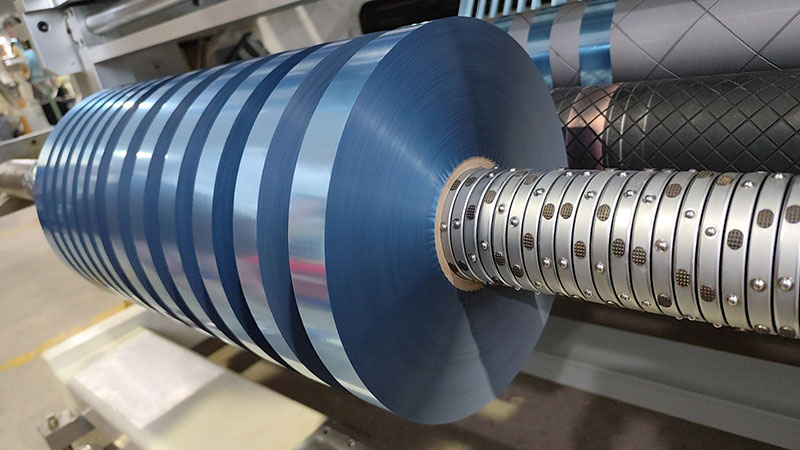
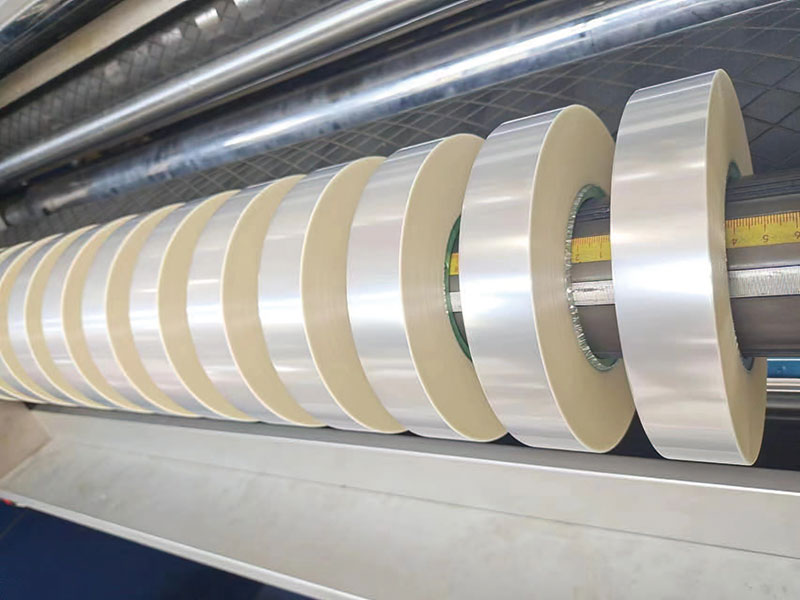
スリッター機のコアとなる技術的パラメータは、切断精度と効率に直接影響します。以下は、主要なパラメータとその影響の詳細な分析です。
1. 機械システムのパラメータ
• カッターシャフトのラジアル振れ(≤0.005mm)
振れ値が0.001mm増加するごとに、切削バリ率は5%~10%増加する可能性があります。高精度ベアリング(例:SKF P4クラス)とダイナミックバランス補正(G1クラス)は、0.003mm以内で制御可能です。
• レールの真直度(±0.01mm/m)
研削グレードのローラーガイド(THK SRGシリーズなど)を使用すると、通常のガイドの精度が50%向上し、長期摩耗率が70%削減されます。
• 張力制御(±1N)
サーボ閉ループ張力システムの応答時間は≤10msであり、薄膜材料の張力変動は2%以内に制御する必要があります。そうでないと、蛇行した曲がりが生じやすくなります。
2. モーション制御パラメータ
• 繰り返し精度(±0.02mm)
アブソリュートエンコーダ(23ビット分解能)を使用すると、位置決め誤差を±0.005mmに制御できます。一般的なステッピングモータ(ステップ角1.8°)の累積誤差は0.1mm/mに達することがあります。
• 最大加速度(2G)
加速度は0.5Gから2Gに増加し、ツール交換時間は3秒から0.8秒に短縮できますが、振動を防ぐために2000Hzのサーボゲイン調整を備える必要があります。
• 同期誤差(≤0.003°)
2軸駆動時はEtherCATバス(100Mbps)により従来のパルス制御に比べ10倍の同期精度を実現。
3. ツールパラメータ
• エッジ粗さ(Ra≤0.2μm)
鏡面研磨工具の寿命は3倍に延びますが、加工コストは40%増加します。DLCコーティング工具の摩擦係数は0.1未満まで低減できます。
• 工具角度(30°±0.5°)
1°の角度偏差により、切断力が 15% 増加し、PET 材料セクションの結晶化度に 20% の差が生じます。

4. 材料適応性パラメータ
• 動的補正精度(±0.1mm)
CCD視覚検出(5000fps)は超音波センサーの5倍の速度で応答するために使用され、8m / sの高速スリットに適しています。
• 温度制御(±1℃)
アルミ箔をスリットする場合、刃の温度が10℃上昇するごとに熱変形が0.03mmに達するため、液冷システム(流量5L/分)が必要となります。
5. 効率の主要パラメータ
• 工具交換時間(≤15秒)
クイックチェンジツールホルダー(HSK63 インターフェース)は、従来のフランジツールチェンジャーよりも 80% 効率が優れています。
• 最大線速度(300m/分)
速度が200m/分を超える場合は、エアベアリング(剛性200N/μm)を搭載し、振動を抑制します。

パラメータ最適化戦略
1. 高精度シーン(光学フィルムなど)
◦ ラジアル振れが0.003 mm以下のスピンドルを選択する
◦ 周囲温度は23±0.5℃に制御されます
◦ アクティブノイズキャンセリング振動制御システムを使用
2. 高効率シナリオ(例:包装材)
◦ デュアルステーション巻き戻しを採用(切り替え時間≤2秒)
◦ 6kWサーボモーター搭載(300%過負荷容量)
◦ 自動工具摩耗補正(工具補正あたり0.001mm)
データ比較表
| パラメータ | 通常モデル | 高精度モデル | 影響係数 |
| ナイフの柄が飛び出す | 0.01mm | 0.002mm | 精度★5 |
| 加速度 | 0.8G | 2.5G | 効率★3 |
| 温度制御 | ±5℃ | ±0.3℃ | 歩留まり★4 |
精度と効率のパレート最適化は、体系的なパラメータマッチングによって実現できます。例えば、張力制御誤差を3%から1%に低減することで、不良率を15%削減できます。実際の選定では、材料特性(弾性率、延性)に応じてパラメータを動的に調整する必要があります。






Copyright © 2010-2026 厦門デリッシュオートメーション設備有限公司 All Rights Reserved.
変化に合わせて変化する



 フィルムスリッター
フィルムスリッター リボンスリッター
リボンスリッター スリッターリワインダーマシン
スリッターリワインダーマシン バーコードリボンスリッター
バーコードリボンスリッター テープスリッター
テープスリッター 高速スリッター
高速スリッター 片面粘着スリッター
片面粘着スリッター 半自動熱転写リボンスリッター RSDS5 PLUS
半自動熱転写リボンスリッター RSDS5 PLUS