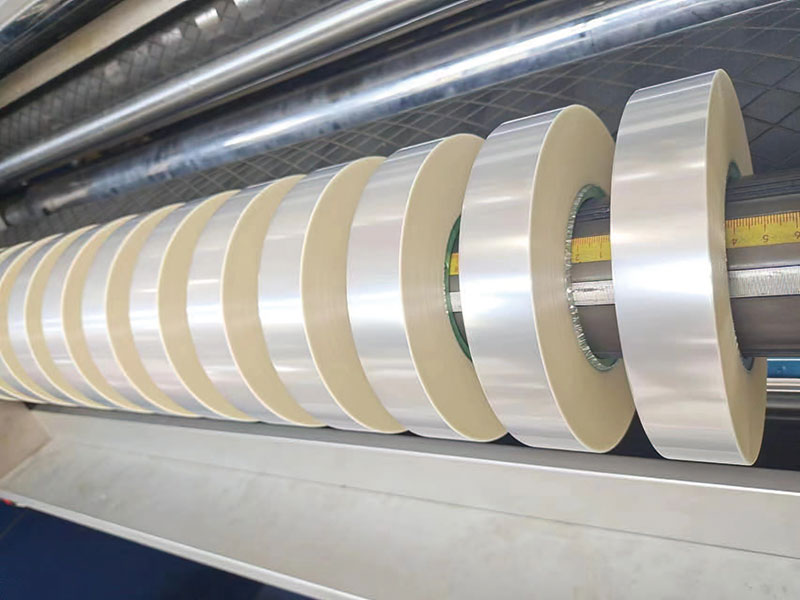
PETフィルムのスリット加工において、巻き取り時のずれは長年の悩みの種です。きれいにスリット加工されたフィルムロールでも、巻き取り段階で端が不均一になることがあります。これは製品の外観に影響を与えるだけでなく、後工程での位置決めを困難にし、最悪の場合、ロール全体を廃棄せざるを得なくなることもあります。こうした問題の根本原因は、多くの場合、補正システムのデバッグが不十分であることにあります。
逸脱の代償はあなたが思っているよりも大きい
多くの人は、ずれとは端が不均一になるという些細な問題だと考えがちですが、実際にはその連鎖反応は想像をはるかに超えるものです。ずれが生じると、巻き取り工程でフィルムに「望遠鏡」のような現象が発生します。フィルムロールの一方の端が突き出し、もう一方の端が凹むのです。この不均一な張力分布によってフィルム表面がさらに押しつぶされ、修復不可能な折り目やしわが生じます。光学グレードのPETフィルムや剥離フィルムといった高級製品の場合、わずか数ミリのずれでもロール全体が廃棄処分となることもあります。
矯正制度の仕組み
偏差の問題を解決するには、まずスリッター機の補正システムの動作原理を理解する必要があります。標準偏差補正システムは、センサー、コントローラー、アクチュエーターという3つの主要コンポーネントで構成されています。
センサーは「見る」役割を担い、光電効果または超音波を用いてフィルム端の位置変化をリアルタイムで検出します。コントローラーは「考える」役割を担い、センサーからの信号を設定位置と比較し、ずれ量を算出します。アクチュエーターは「動かす」役割を担い、通常は油圧式または電動式のアクチュエーターが、巻き取りフレームまたは巻き出しフレーム全体を横方向に押し動かし、フィルムを正しい経路に戻します。
この閉ループ制御は単純に見えるかもしれないが、PETフィルムの特性上、実際には難しい。PETフィルムは滑らかで薄く、張力に敏感なため、わずかな滑りや伸縮変形でもセンサーの判定に支障をきたす。
デバッグの重要な手順
ステップ1:センサーのキャリブレーション
センサーは補正システムの目であり、目が不正確だと、背面は完全に間違っています。デバッグ中は、PETフィルムを通常のフィルム速度で走行させ、フィルムの端をセンサーの検出範囲内で繰り返し移動させ、コントローラーのフィードバック値が直線的に変化するかどうかを観察する必要があります。よくある問題は、センサーの感度が高すぎると、フィルム端のわずかなジッターが増幅されて誤った偏差として検出されるか、感度が低すぎると、実際に偏差が発生してもシステムがそれを検知できないことです。経験的な値は、フィルム端が±3mmずれたときにセンサーがフルスケール信号を出力するようにすることです。
ステップ2:アクチュエータの応答速度を合わせる
アクチュエータを速く押しすぎて過剰補正すると、フィルムが振り子のように左右に揺れます。逆に、ゆっくり押しすぎるとずれの速度に追いつかず、ずれが解消されません。デバッグにはステップ応答テストが必要です。5mmのずれを人為的に作り出し、アクチュエータがフィルムを正しい位置に戻すのにかかる時間を測定します。高速スリッター機(300m/分以上)の場合、応答時間は0.5秒以内に抑え、オーバーシュート量は1mmを超えないようにする必要があります。
ステップ3:リンク機構の張力調整と修正
これは最も見落とされがちな点です。PETフィルムの巻き取り工程では、ロール径が小さいものから大きいものへと変化し、張力要件も変化します。張力制御システムと補正システムが独立している場合、張力変動が補正効果に直接影響を与えます。試運転時には、空のロールから満杯のロールまで、巻き取り工程全体を通して補正システムの安定性を観察する必要があります。一般的な方法としては、張力制御プログラムにフィードフォワード補正を追加し、体積の急激な増加が検出された場合、システムの過敏性を回避するために補正のゲイン係数を自動的に低減するという方法があります。
ステップ4:デッドゾーン設定
生産ラインにおいて絶対的な安定性を実現することは不可能であり、フィルムの端にわずかな変動が生じるのは正常な範囲内です。ガイド補正システムが1mmのずれにも反応してしまうと、混乱を招く可能性があります。例えば、±0.5mmの非活動領域といった「デッドゾーン」を設定することで、ノイズ干渉を効果的に除去し、システムが本当に必要な場合にのみ介入するようにすることができます。

実際の戦闘で踏みやすい落とし穴
現場経験によると、ずれの問題の80%は補正システム自体ではなく、設置基礎に起因しています。スリッター機の脚部の緩み、巻き取りアームベアリングの摩耗、ガイドレールのクリアランスの過剰などは、補正システムを直接「誤作動」させる機械的故障です。電気パラメータの調整を行う前に、ダイヤルゲージを使用して巻き取りフレームの横方向移動時の直線性を必ず確認し、ずれが0.1mm/mを超える場合は機械的なトリミングが必要です。
もう一つのよくある落とし穴は、光電センサーによる周囲光の干渉です。PETフィルムの表面は鏡面反射を起こし、作業場の蛍光灯や自然光の変化によってセンサーの測定値がずれることがあります。解決策としては、レンズフードを追加するか、超音波センサーに切り替えることです。超音波センサーは光の影響を受けにくく、透明なPETフィルムの検査に適しています。
試運転後の検証基準
試運転が完了したら、数分間様子を見るだけで作業を終えるわけにはいきません。連続運転試験には、長さ2000メートル以上のPETフィルムロールを使用し、巻き取り後のフィルムコイルの端面の3箇所をスチール定規で端面アライメントを測定することをお勧めします。品質基準は、偏差が±1mmを超えないことです。±0.5mm以内であれば、試運転は非常に成功したと言えます。
同時に、動作中の補正アクチュエータの動作頻度も記録される。正常なシステムは「過活動を微調整する」状態、つまり、頻繁だが小さな補正動作を繰り返し、長時間の静止状態の後、突然大きな動きをするという状態ではない。
受動的な矯正から能動的な予防へ
真の熟練者は、不具合が発生するまでデバッグを待つことはありません。日常の生産においては、補正システムのためのスポット検査システムを確立することをお勧めします。各シフト開始前に標準テストピースを使用してセンサーの精度を確認し、週に一度アクチュエータの固定ボルトをチェックし、月に一度補正動作の履歴データを分析します。特定の機器の補正動作の頻度が急激に増加した場合、ベアリングの摩耗やガイドレール間の隙間の拡大を示していることが多く、後から修正するよりも事前に対処する方がはるかにトラブルが少なくなります。
巻き取りのずれは、治らない末期疾患ではなく、むしろ根治治療が必要な慢性疾患のようなものです。補正システムのデバッグを詳細かつ実践的に行えば、PETフィルムのスリット加工における品質安定性は向上します。結局のところ、ナイフのようにきれいにカットされたフィルムロールは、技術力の高さを示すだけでなく、顧客に対する最も基本的な敬意の表れでもあるのです。






Copyright © 2010-2026 厦門デリッシュオートメーション設備有限公司 All Rights Reserved.
変化に合わせて変化する

 新エネルギーフィルムMPETスリッター
新エネルギーフィルムMPETスリッター 修正テープスリッター CTS-550-M
修正テープスリッター CTS-550-M PETフィルムスリッター RSDS7H 1350 PLUS
PETフィルムスリッター RSDS7H 1350 PLUS 修正テープスリッター CTS-570-A
修正テープスリッター CTS-570-A PETフィルムスリッター(RSDS7H) 1350
PETフィルムスリッター(RSDS7H) 1350